
【行业】机器人专题-液压气压驱动方式解析(15页)
2022-09-19
机器人液压驱动方式。液压驱动系统的工作原理是以压缩机油来驱动执行机构进行工作,包括液动机(各种油缸、油马达)、伺服阀、油系、油箱等基本组成部分。液压驱动的输出力和功率很大,能构成伺服机构,常用于大型机器人关节的驱动,大多用于要求输出力较大的场合。液压驱动系统主要由液压缸和液压阀等组成。液压缸结构简单、工作可靠,是液压驱动系统的主要执行元件,可以将液压能转变为机械能、做直线往复运动或摆动运动。用液压缸来实现往复运动时,可免去减速装置,且没有传动间隙,运动平稳,因此在各种液压系统中得到广泛应用。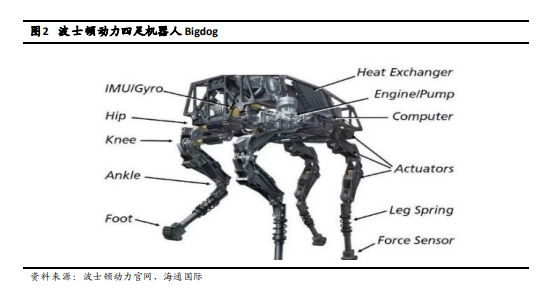 机器人气压驱动方式。气压驱动的工作原理基本上是以气体为工作介质,弹性腔体在气压和结构约束的作用下,在一定的空间维度上产生各种形式的运动。弹性腔体通常采用易于拉伸弹性材料,或者不可拉伸但易于折叠的薄壳或薄膜结构。根据其不同的形式特点,可以分为以下几种驱动器。
机器人气压驱动方式。气压驱动的工作原理基本上是以气体为工作介质,弹性腔体在气压和结构约束的作用下,在一定的空间维度上产生各种形式的运动。弹性腔体通常采用易于拉伸弹性材料,或者不可拉伸但易于折叠的薄壳或薄膜结构。根据其不同的形式特点,可以分为以下几种驱动器。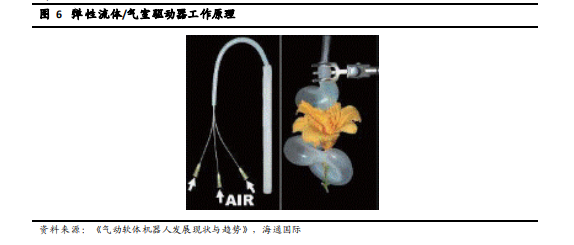 正压展开软体驱动器。正压驱动的折叠/褶皱气动软体驱动器的柔性气室,通常可以被折叠或压缩。当驱动器内部空气压力增大时,柔性气腔可以膨胀。这种结构主要的形式是流体折纸结构,它可以形成管状内腔,利用折叠参数与内部流体体积变化之间的复杂关系,同时实现变形和刚度的优化。此外,还有衍生的双模变形折纸结构。
正压展开软体驱动器。正压驱动的折叠/褶皱气动软体驱动器的柔性气室,通常可以被折叠或压缩。当驱动器内部空气压力增大时,柔性气腔可以膨胀。这种结构主要的形式是流体折纸结构,它可以形成管状内腔,利用折叠参数与内部流体体积变化之间的复杂关系,同时实现变形和刚度的优化。此外,还有衍生的双模变形折纸结构。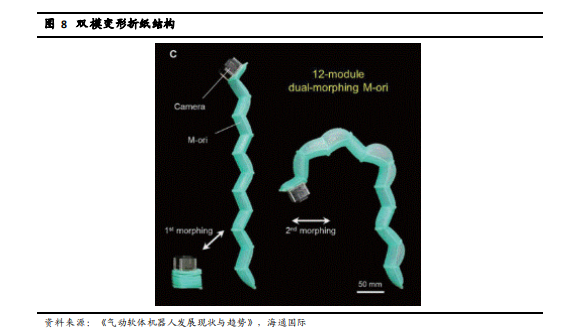
机器人气压驱动方式。气压驱动的工作原理基本上是以气体为工作介质,弹性腔体在气压和结构约束的作用下,在一定的空间维度上产生各种形式的运动。弹性腔体通常采用易于拉伸弹性材料,或者不可拉伸但易于折叠的薄壳或薄膜结构。根据其不同的形式特点,可以分为以下几种驱动器。
正压展开软体驱动器。正压驱动的折叠/褶皱气动软体驱动器的柔性气室,通常可以被折叠或压缩。当驱动器内部空气压力增大时,柔性气腔可以膨胀。这种结构主要的形式是流体折纸结构,它可以形成管状内腔,利用折叠参数与内部流体体积变化之间的复杂关系,同时实现变形和刚度的优化。此外,还有衍生的双模变形折纸结构。 



